各模組的腳位類型、建議接線與優先使用腳位一覽。
燈光輸出、狀態指示
按鈕觸發、手動控制
偵測光線強度
手動調整數值(風速/亮度/角度)
偵測有人/無人
偵測火焰、強光變化
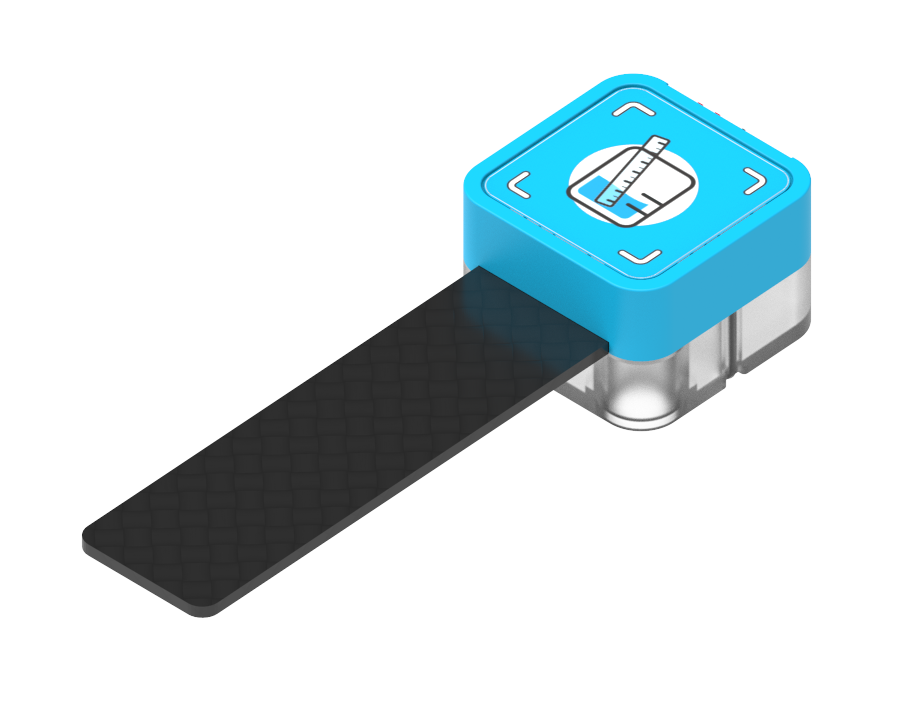
偵測濕度
偵測雨水/水位
偵測距離
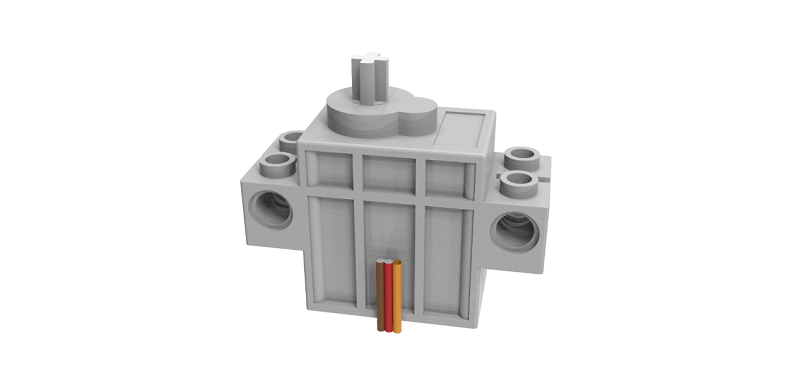
控制角度(窗簾/閘門)
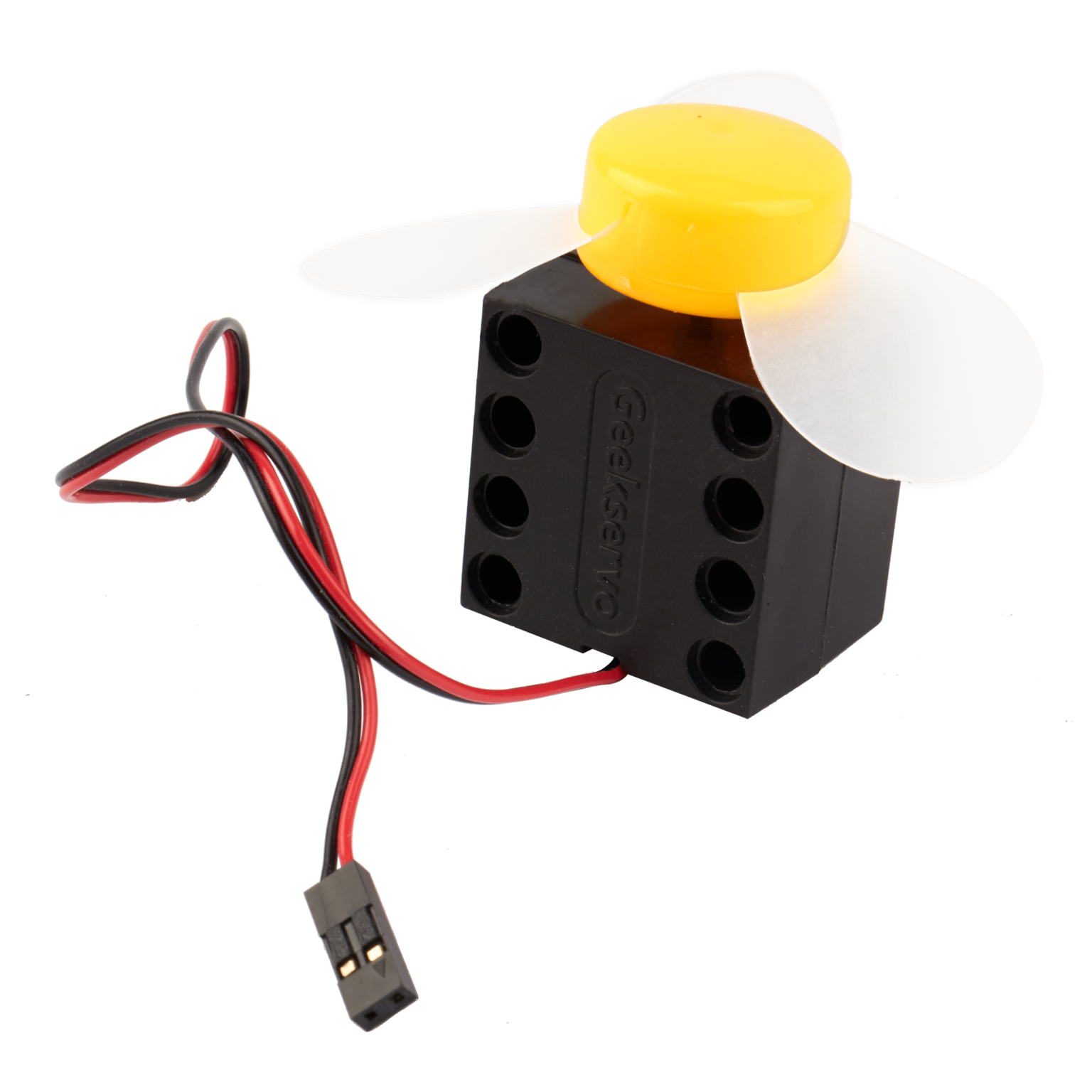
風扇轉動
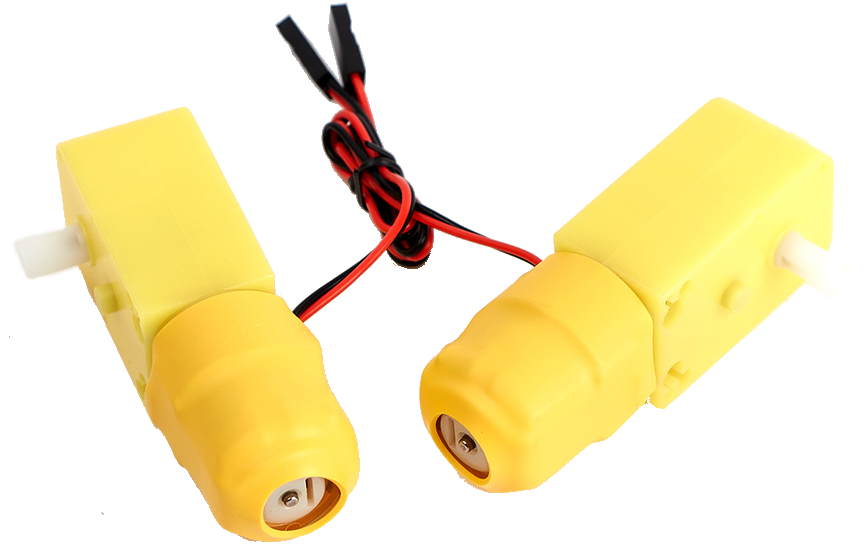
馬達轉動